
Sitemap
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Pages
DevOps & Platform Engineering
Kubernetes, GitOps, and cloud-native insights
Posts
Homelab: The Evolution of Kubernetes Networking - From Ingress to Gateway API
Published:
Networking in Kubernetes has always been a journey of trade-offs. Ever since I started working with kuberentes I relied on VirtualServers the proprietary NGINX CRDs, and the standard Ingress resource.
Building a Kubernetes Certificate Signer Operator: Lessons Learned
Published:
Building a Kubernetes Certificate Signer Operator: Lessons Learned
Upgrading my Kubernetes Cluster with Kubeadm
Published:
Upgrading my Kubernetes Cluster with Kubeadm
Setting up a Kubernetes Cluster the Hard Way with kubeadm (GitOps Series, Part 3)
Published:
Setting up a Kubernetes Cluster the Hard Way with kubeadm (GitOps Series, Part 3)
Setting up a Kubernetes Cluster the Hard Way with kubeadm (GitOps Series, Part 2)
Published:
Setting up a Kubernetes Cluster the Hard Way with kubeadm (GitOps Series, Part 2)
Setting up a Kubernetes Cluster the Hard Way with kubeadm (GitOps Series, Part 1)
Published:
Setting up a Kubernetes Cluster the Hard Way with kubeadm (GitOps Series, Part 1)
How to Use Docker Containers and systemd to Manage Robotics Applications
Published:
How to Use Docker Containers and systemd to Manage Robotics Applications
Introducing a New RVIZ2 Plugin for Displaying Vision_msgs in ROS 2
Published:
Are you looking for an easy and efficient way to display object detection data in ROS 2 humble1? If so, I have some exciting news for you! We have just released a new RVIZ2 plugin that can help you visualize vision_msgs in a visually appealing and informative way.
Introducing a ROS2-Gazebo Drone Simulation Plugin: A New Frontier in ease of use for UAV Simulation
Published:
As a fervent enthusiast and professional in the realm of robotics and autonomous systems, I am excited to share with the community: the release of a my ROS2-Gazebo drone simulation plugin. This project, which can be found on GitHub (sjtu_drone), represents a UAV (Unmanned Aerial Vehicle) simulation.
portfolio
EnRicH 2019
Published:
European Robotics Hackathon 2019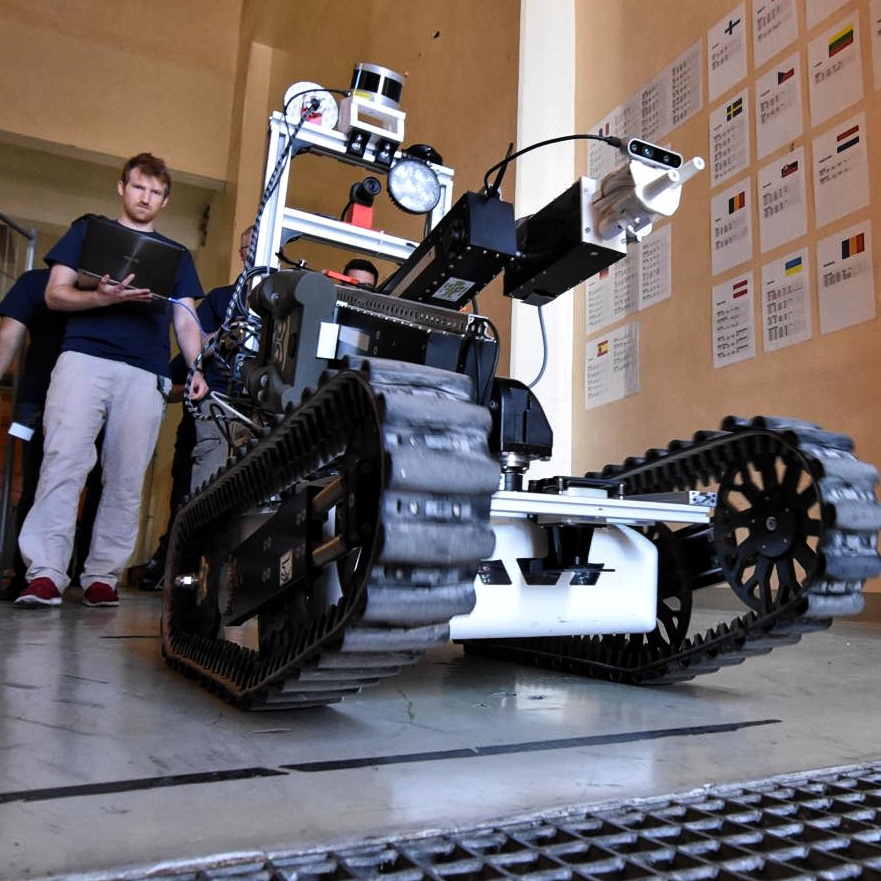
RCLPY: From Zero to Hero
Published:
Your comprehensive, hands-on guide to mastering ROS 2 with Python. Learn to build robust modular robotic systems through practical examples and detailed explanations.
publications
Estimating a Sparse Representation of Gaussian Processes Using Global Optimization and the Bayesian Information Criterion
Published in Proceedings of the ARW & OAGM Workshop 2018, 2018
Abstract: Localization in mobile robotics is an active research area. Statistical tools such as Bayes filters are used for localization. The implementation of Gaussian processes in Bayes filters to estimate transition and measurement models were introduced recently. The non-linear and non-parametric nature of Gaussian processes leads to new possibilities in modelling systems. The high model complexity and computation expense based on the size of the dataset are shortcomings of Gaussian process Bayes filters. This work discusses our approach of a sparsing process of a dataset based on Bayesian information criterion model selection and global optimization. The developed approach combines the idea of avoiding model overfitting and Bayesian optimization to estimate a sparse representation of a Gaussian process. Based on visual odometry data of a mobile robot, the method was evaluated. The results show the operability of the system and unfold limitations of the current implementation such as random-initialization.
Recommended citation: Wöber, W., Novotny, G., Aburaia, M., Otrebski, R., & Kubinger, W. (2018). Estimating a Sparse Representation of Gaussian Processes Using Global Optimization and the Bayesian Information Criterion. Proceedings of the Austrian Robotics Workshop 2018, 13–16. https://doi.org/10.15203/3187-22-1-04
Robbie–A tele-operated robot with autonomous capabilities for EnRicH-2019 robotics trial
Published in Proceedings of the ARW & OAGM Workshop 2019, 2019
Abstract: In public emergencies such as nuclear accidents or natural disasters, an immediate and accurate overview as well as an assessment of the area is the basis of all coordinated plans and actions for the rescue team. The persistent lack of such information leads to high risks and casualties for rescue workers. Mobile robots help to minimize risks and support the rescue teams with urgent information, as well as with debris clearing and search and rescue operations. This work discusses the necessities and requirements of mobile robots in search and rescue (S&R) applications such as an nuclear disaster. Further it describes the current hardware setup as well as the software architecture of the mobile robot Robbie of UAS Technikum Wien.
Recommended citation: Emsenhuber, S., Philipp, K., Pöschko, C., Voglsinger, F., Novotny, G., & Kubinger, W. (2019). Robbie – A tele-operated robot with autonomous capabilities forEnRicH-2019 robotics trial. Proceedings of the ARW & OAGM Workshop 2019, 117–118. https://doi.org/10.3217/978-3-85125-663-5-22
A Mobile Robot Platform for Search and Rescue Applications
Published in Proceedings of the 30th International DAAAM Symposium "Intelligent Manufacturing & Automation", 2019
Abstract: In public emergencies such as nuclear accidents or natural disasters, an immediate and accurate overview as well as an assessment of the area is the basis of all coordinated plans and actions for the rescue team. The persistent lack of such information leads to high risks and casualties for rescue workers. Mobile robots help to minimize risks and support the rescue teams with urgent information, as well as with debris clearing and search and rescue operations. This work discusses the necessities and requirements of mobile robots in search and rescue (S&R) applications such as a nuclear disaster and evaluates an implementation based on the system architecture of the mobile S&R robot “Robbie” of UAS Technikum Wien.
Recommended citation: Novotny, G., Novotny, G. A., Emsenhuber, S., Klammer, P., Pöschko, C., Voglsinger, F., & Kubinger, W. (2019). A Mobile Robot Platform for Search and Rescue Applications. In B. Katalinic (Ed.), 30th DAAAM International Symposium Intelligent Manufacturing & Automation (pp. 945–954). DAAAM INTERNATIONAL SYMPOSIUM ON INTELLIGENT MANUFACTURING AND AUTOMATION . https://doi.org/10.2507/30th.daaam.proceedings.131
Autonomous Vehicles: Vehicle Parameter Estimation Using Variational Bayes and Kinematics
Published in Applied Sciences, 2020
Abstract: On-board sensory systems in autonomous vehicles make it possible to acquire information about the vehicle itself and about its relevant surroundings. With this information the vehicle actuators are able to follow the corresponding control commands and behave accordingly. Localization is thus a critical feature in autonomous driving to define trajectories to follow and enable maneuvers. Localization approaches using sensor data are mainly based on Bayes filters. Whitebox models that are used to this end use kinematics and vehicle parameters, such as wheel radii, to interfere the vehicle’s movement. As a consequence, faulty vehicle parameters lead to poor localization results. On the other hand, blackbox models use motion data to model vehicle behavior without relying on vehicle parameters. Due to their high non-linearity, blackbox approaches outperform whitebox models but faulty behaviour such as overfitting is hardly identifiable without intensive experiments. In this paper, we extend blackbox models using kinematics, by inferring vehicle parameters and then transforming blackbox models into whitebox models. The probabilistic perspective of vehicle movement is extended using random variables representing vehicle parameters. We validated our approach, acquiring and analyzing simulated noisy movement data from mobile robots and vehicles. Results show that it is possible to estimate vehicle parameters with few kinematic assumptions.
Recommended citation: Wöber, W., Novotny, G., Mehnen, L., & Olaverri-Monreal, C. (2020). Autonomous vehicles: Vehicle parameter estimation using variational bayes and kinematics. Applied Sciences (Switzerland), 10(18). https://doi.org/10.3390/APP10186317
Design and Implementation of a Mobile Search and Rescue Robot
Published in Proceedings of Proceedings of the Joint Austrian Computer Vision and Robotics Workshop 2020, 2020
Abstract: For public emergencies such as nuclear accidents or natural disasters, an urgent and reliable description as well as an evaluation of the environ- ment form the basis of all organized search and res- cue (S&R) team plans and actions. If this informa- tion is not available the risks for the rescue services increases dramatically. Mobile robots help to mini- mize these risks by providing information about the disaster site to rescue teams. This paper discusses the needs and requirements of mobile robots in S&R application areas such as nu- clear disasters and evaluates results achieved during the ENRICH 2019 trial based on the system architec- ture of the mobile S&R robot ”Robbie” of UAS Tech- nikum Vienna. The successful participation of the ENRICH 2019 show that the mobile robot is capa- ble of performing S&R actions during emergencies.
Recommended citation: Novotny, G. A., & Kubinger, W. (2020). Design and Implementation of a Mobile Search and Rescue Robot. In P. M. Roth, G. Steinbauer, F. Fraundorfer, M. Brandstötter, & R. Perko (Eds.), Proceedings of the Joint Austrian Computer Vision and Robotics Workshop 2020 (pp. 21–26). Verlag der Technischen Universität Graz. https://doi.org/10.3217/978-3-85125-752-6-06
Evaluierung von Navigationsmethoden für mobile Roboter
Published in e & i Elektrotechnik und Informationstechnik, 2020
Abstract: Intelligent mobile robots and service robots are central parts of autonomous productions and flexible manufacturing. Interconnected industrial robot-based automation allows customized productions for which mobile robots are used for transport of material and tools. The digital factory of the UAS Technikum Wien is a research project which focuses on experimental evaluation of novel technologies for digital manufacturing. This paper discusses applications of mobile and service robots in the digital factory. Based on a production use case, we analyze several methods for navigation in terms of accuracy of those approaches and discuss safety aspects.
Recommended citation: Wöber, W., Rauer, J., Papa, M., Aburaia, A., Schwaiger, S., Novotny, G., Aburaia, M., & Kubinger, W. (2020). Evaluierung von Navigationsmethoden für mobile Roboter. E & i Elektrotechnik Und Informationstechnik, 137(6), 316–323. https://doi.org/10.1007/s00502-020-00820-x
Mobile Delivery Robots: Mixed Reality-Based Simulation Relying on ROS and Unity 3D
Published in Proceedings of 2020 IEEE Intelligent Vehicles Symposium (IV), 2020
Abstract: In the context of Intelligent Transportation Systems and the delivery of goods, new technology approaches need to be developed in order to cope with certain challenges that last mile delivery entails, such as navigation in an urban environment. Autonomous delivery robots can help overcome these challenges. We propose a method for performing mixed reality (MR) simulation with ROS-based robots using Unity, which synchronizes the real and virtual environment, and simultaneously uses the sensor information of the real robots to locate themselves and project them into the virtual environment, so that they can use their virtual doppelganger to perceive the virtual world. Using this method, real and virtual robots can perceive each other and the environment in which the other party is located, thereby enabling the exchange of information between virtual and real objects. Through this approach a more realistic and reliable simulation can be obtained. Results of the demonstrated use-cases verified the feasibility and efficiency as well as the stability of implementing MR using Unity for Robot Operating System (ROS)-based robots.
Recommended citation: Liu, Y., Novotny, G., Smirnov, N., Morales-Alvarez, W., & Olaverri-Monreal, C. (2020). Mobile Delivery Robots: Mixed Reality-Based Simulation Relying on ROS and Unity 3D. IEEE Intelligent Vehicles Symposium, Proceedings, 15–20. https://doi.org/10.1109/IV47402.2020.9304701
Study of ROS-Based Autonomous Vehicles in Snow-Covered Roads by Means of Behavioral Cloning Using 3DCoAutoSim
Published in Information Systems and Technologies, 2022
Abstract: Autonomous driving in winter weather conditions has always been a unique challenge, and as such it is an interesting research topic. Due to reasons related to safety and local laws, simulators have become one of the first choice for the required research. This paper extends the capabilities of the 3DCoAutoSim simulation platform with a realistic simulation environment for the study of autonomous driving with ROS-controlled vehicles in adverse weather conditions such as snow-covered roads. The weather-related details of the environment such as snow fall and car tracks on the snow were implemented by using Unity3D’s physics and graphics engine. A series of autonomous driving experiments based on behavioral cloning were performed to test the performance of the environment and its scalability for ROS-based machine learning applications. Results from the experiments conducted to validate the approach demonstrated a good driving performance. Moreover, results from the model trained with the data set generated in the snowy environment, showed that car tracks features in the snow promoted the learning and generalization steps in the machine learning process.
Recommended citation: Liu, Y., Morales-Alvarez, W., Novotny, G., & Olaverri-Monreal, C. (2022). Study of ROS-Based Autonomous Vehicles in Snow-Covered Roads by Means of Behavioral Cloning Using 3DCoAutoSim. In A. Rocha, H. Adeli, G. Dzemyda, & F. Moreira (Eds.), Information Systems and Technologies (pp. 211–221). Springer International Publishing. https://doi.org/10.1007/978-3-031-04829-6_19
Autonomous Vehicle Calibration via Linear Optimization
Published in Proceedings of 2022 IEEE Intelligent Vehicles Symposium (IV), 2022
Abstract: In navigation activities, kinematic parameters of a mobile vehicle play a significant role. Odometry is most commonly used for dead reckoning. However, the unrestricted accumulation of errors is a disadvantage using this method. As a result, it is necessary to calibrate odometry parameters to minimize the error accumulation. This paper presents a pipeline based on sequential least square programming to minimize the relative position displacement of an arbitrary landmark in consecutive time steps of a kinematic vehicle model by calibrating the parameters of applied model. Results showed that the developed pipeline produced accurate results with small datasets.
Recommended citation: Novotny, G., Liu, Y., Wober, W., & Olaverri-Monreal, C. (2022). Autonomous Vehicle Calibration via Linear Optimization. IEEE Intelligent Vehicles Symposium, Proceedings, 2022-June, 527–532. https://doi.org/10.1109/IV51971.2022.9827109
Development of a ROS-Based Architecture for Intelligent Autonomous on Demand Last Mile Delivery
Published in Computer Aided Systems Theory - EUROCAST 2022, 2023
Abstract: This paper presents the development of the JKU-ITS Last Mile Delivery Robot. The proposed approach utilizes a combination of one 3D LIDAR, RGB-D camera, IMU and GPS sensor on top of a mobile robot slope mower. An embedded computer, running ROS1, is utilized to process the sensor data streams to enable 2D and 3D Simultaneous Localization and Mapping, 2D localization and object detection using a convolutional neural network.
Recommended citation: Novotny, G., Morales-Alvarez, W., Smirnov, N., & Olaverri-Monreal, C. (2022). Development of a ROS-Based Architecture for Intelligent Autonomous on Demand Last Mile Delivery. In R. Moreno-Díaz, F. Pichler, & A. Quesada-Arencibia (Eds.), Computer Aided Systems Theory – EUROCAST 2022 (pp. 337–344). Springer Nature Switzerland.
JKU-ITS Automobile for Research on Autonomous Vehicles
Published in Computer Aided Systems Theory - EUROCAST 2022, 2023
Abstract: In this paper, we present our brand-new platform for Automated Driving research. The chosen vehicle is a RAV4 hybrid SUV from TOYOTA provided with exteroceptive sensors such as a multilayer LIDAR, a monocular camera, Radar and GPS; and proprioceptive sensors such as encoders and a 9-DOF IMU. These sensors are integrated in the vehicle via a main computer running ROS1 under Linux 20.04. Additionally, we installed an open-source ADAS called Comma Two, that runs Openpilot to control the vehicle. The platform is currently being used to research in the field of autonomous vehicles, human and autonomous vehicles interaction, human factors and energy consumption.
Recommended citation: Certad, N., Morales-Alvarez, W., Novotny, G., & Olaverri-Monreal, C. (2022). JKU-ITS Automobile for Research on Autonomous Vehicles. In R. Moreno-Díaz, F. Pichler, & A. Quesada-Arencibia (Eds.), Computer Aided Systems Theory – EUROCAST 2022 (pp. 329–336). Springer Nature Switzerland.
On the Applicability of Docker Containers and systemd Services for Search and Rescue Applications
Published in Proceedings of the Austrian Robotics Workshop 2023, 2023
Abstract: The use of robotics in search and rescue operations has grown in recent years, as these systems have the potential to greatly improve the efficiency and effectiveness of rescue efforts. However, developing and maintaining robotics systems for search and rescue applications can be challenging. These systems often operate in harsh and unpredictable environments, which demands high autonomy and intelligent behavior of the robots. Such robots are developed based on a vast amount of (open source) software solutions, which force robotic engi- neers to focus on systems engineering instead of application implementation. One way to address robot maintenance is to use containerization and service management technologies, such as Docker containers and systemd services, to manage the software and resources on the robotics platform. Docker containers allow applications and their dependencies to be packaged in a portable, isolated environment, while systemd provides a reliable and flexible way to manage system processes. In addition, monitoring tools can be used to track system resources and alert human supervisors to potential issues, while deployment tools can streamline the process of deploying and maintaining the robotics platform. This paper tackles the identification and presentation of useful tools for robotic system maintenance focusing on search and rescue robots. We aim to provide a guideline for the robotic system maintenance process, and explore the applicability of Docker containers, systemd services, and other tools for search and rescue robotics applications. We discuss the benefits and potential challenges of using these technologies, and provide examples for application. Through our analysis, we aim to provide insight into the potential of containerization, service management, monitoring, and deployment technologies to en- hance the capabilities of search and rescue robotics systems. We hope that our study will simplify the development and maintenance procedure for robotic system development.
Recommended citation: Novotny, G., Schwaiger, S., Muster, L., Aburaia, M., & Wöber, W. (2023). On the Applicability of Docker Containers and systemd Services for Search and Rescue Applications. In A. Müller, M. Nader, & H. Gattringer (Eds.), Proceedings of the Austrian Robotics Workshop (pp. 19–24). Johannes Kepler University. https://www.joanneum.at/fileadmin/ROBOTICS/ARW_Proceedings/2023_ARW_Proceedings.pdf
Vehicle Side-Slip Angle Estimation under Snowy Conditions using Machine Learning
Published in Integrated Computer-Aided EngineeringIntegrated Computer-Aided Engineering, 2023
Abstract: Adverse weather conditions, such as snow-covered roads, represent a challenge for autonomous vehicle research. This is particularly challenging as it might cause misalignment between the longitudinal axis of the vehicle and the actual direction of travel. In this paper, we extend previous work in the field of autonomous vehicles on snow-covered roads and present a novel approach for side-slip angle estimation that combines perception with a hybrid artificial neural network pushing the prediction horizon beyond existing approaches. We exploited the feature extraction capabilities of convolutional neural networks and the dynamic time series relationship learning capabilities of gated recurrent units and combined them with a motion model to estimate the side-slip angle. Subsequently, we evaluated the model using the 3DCoAutoSim simulation platform, where we designed a suitable simulation environment with snowfall, friction, and car tracks in snow. The results revealed that our approach outperforms the baseline model for prediction horizons ⩾ 2 seconds. This extended prediction horizon has practical implications, by providing drivers and autonomous systems with more time to make informed decisions, thereby enhancing road safety.
Recommended citation: Novotny, G., Liu, Y., Morales-Alvarez, W., Wöber, W., & Olaverri-Monreal, C. (2023). Vehicle side-slip angle estimation under snowy conditions using machine learning. Integrated Computer-Aided Engineering, Preprint, 1–21. https://doi.org/10.3233/ICA-230727
UGV-CBRN: An Unmanned Ground Vehicle for Chemical, Biological, Radiological, and Nuclear Disaster Response
Published in ArXiv, 2024
Abstract: Robotic search and rescue (SAR) supports response teams by accelerating disaster assessment and by keeping operators away from hazardous environments. In the event of a chemical, biological, radiological, and nuclear (CBRN) disaster, robots are deployed to identify and locate radiation sources. Human responders then assess the situation and neutralize the danger. The presented system takes a step toward enhanced integration of robots into SAR teams. Integrating autonomous radiation mapping with semi-autonomous substance sampling and online analysis of the CBRN threat lets the human operator localize and assess the threat from a safe distance. Two LiDARs, an IMU, and a Geiger counter are used for mapping the surrounding area and localizing potential radiation sources. A mobile manipulator with six Degrees of Freedom manipulates valves and samples substances that are analyzed by an onboard Raman spectrometer. The human operator monitors the mission’s progression from a remote location defining target locations and directing the semi-autonomous manipulation processes. Diverse recovery behaviours aid robot deployment, system state monitoring, as well as recovery of hard- and software. Field tests showcase the capabilities of the presented system during trials at the CBRN disaster response challenge European Robotics Hackathon (EnRicH).
Recommended citation: Schwaiger, S., Muster, L., Novotny, G., Schebek, M., Wöber, W., Thalhammer, S., & Böhm, C. (2024). UGV-CBRN: An Unmanned Ground Vehicle for Chemical, Biological, Radiological, and Nuclear Disaster Response. arXiv preprint arXiv:2406.14385. https://arxiv.org/abs/2406.14385